

Server-Shenanigans
Accidentally becoming a sysadmin and lived to tell the tale

I teach metal and sand how to understand space
Before adopting my current brand of chaos at CMU, I spent my time sharing a sandbox with some delightfully brilliant (and unhinged) humans at Skild.ai and ARTPARK (IISc)
IROS 2026
Instead of giving each robot a smarter local controller, TOLD adapts who each robot listens to — rewiring edge weights online via gradient descent to minimize formation error. No training, no centralized coordinator, stackable on any existing method.

ArXiv
IRisPath fuses infrared and RGB camera streams to build robust costmaps for off-road robot navigation that remain reliable in both daylight and nighttime conditions without specialized calibration targets.
TMLR 2025 — 2025
A consensus-based decentralised cooperative monitoring system for agile targets using swarm robots under uncertainty accepted at Transactions on Machine Learning Research.
IEEE INDICON 2023 — 2023
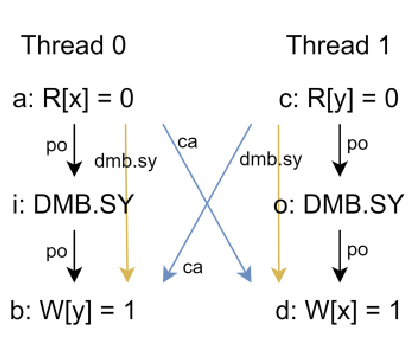
An automated litmus-test synthesis tool that generates distinguishing tests between two versions of a memory model, used for formal verification of ARM's memory architecture.

IEEE Connect 2022 — 2022
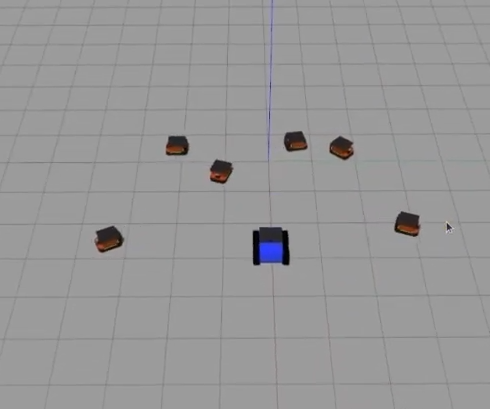
A priority-based decentralised algorithm for multi-robot path planning that resolves inter-agent conflicts without central coordination, demonstrated on a physical multi-robot testbed.

UR5-based robot configured with Basler camera and ROS. Uses Fourier-Mellin transform for 90ms single-reference object detection for precision pick-and-place tasks.

Autonomous navigation stack for SUV-scale vehicle — LiDAR-camera fusion costmap, DWA + TEB planners, LIOSAM/LOAM SLAM, and drive-by-wire control via CAN bus.
Accidentally becoming a sysadmin and lived to tell the tale
How to get your robots to carry out their autonomous motion in real life
Indulging in the beautiful field called multi-robot path planning using Private Obstacle Path Planning algorithm
$ g++ main.cc -lpthread && ./a.out >>splashOfLife
Another hobby I dabble with — animation, SFX, and a little bit of design.
If the content deserves a dub you shall leave a sub.
The Master created humans first as The Lowest Type, most easily formed. Gradually, he replaced them by robots, the next higher step, and finally he created me, to take the place of the last humans.