Topological Online Learning for Displacement (TOLD) based Formation Control
* Equal contribution
Summary
Drone swarms and multi-robot teams need to hold a precise geometric shape even when individual robots are hit by wind gusts, sensor noise, or sudden disturbances. The conventional approach gives each robot a smarter local controller — but those controllers act in isolation and never change how much each robot trusts its neighbors.
TOLD takes a different angle. Instead of fighting disturbances at each node, we adapt the communication weights between robots online — using gradient descent on the live formation error. Think of it as the formation's attention redistributing itself in real time: if a robot drifts, its neighbors automatically increase how strongly they pull it back.
No pre-training. No centralized coordinator.
Method
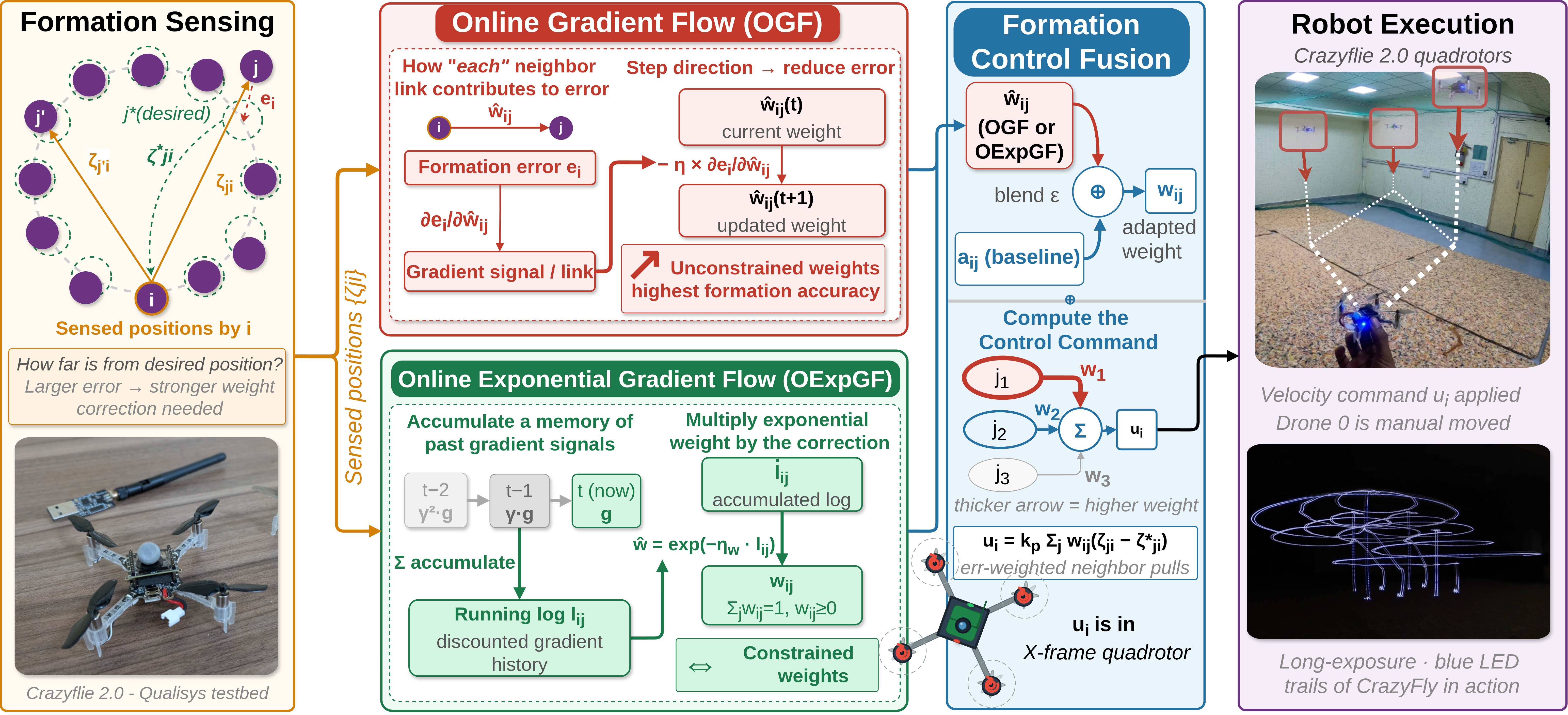
Each robot runs the same consensus law. The only difference between algorithms is how the edge weights wij are updated.
Results
Three Crazyflie 2.0 quadrotors on a Qualisys motion-capture testbed. Drone 0 (leader) is auto piloted along a challenging 3D upward spiral; followers execute the formation algorithm using only relative position measurements from their two spatial neighbors.
[ Field Notes ]
Hardware experiments: occasionally graceful, always educational. Crashes inclusive to share the pain.
Interactive Demo
The solid white circle is the leader (agent 0). Drag it or use arrow keys to move it. Ghost clusters show where each algorithm positions the follower agents. Differences are most visible after the algorithms have been running for a few seconds on the Figure-8 path — watch the error values in the legend diverge as OGF adapts its edge weights.
Arrow keys: move leader | Q / W: height up / down | Space: pause | R: reset
Acknowledgements
We thank Varad Vaidya, Samahith S A, and Naveed Shaikh for their help conducting the hardware experiments and for many valuable discussions.
BibTeX
@inproceedings{gupta2026told,
title = {Topological Online Learning for Displacement-based Formation Control},
author = {Gupta, Shubhankar and Sharma, Saksham and Sundaram, Suresh},
booktitle = {IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},
year = {2026},
}